Mechanical Modeler |
Navigating a Part DocumentExploring mechanical entities down to topological entities |
|
| Use Case | ||
AbstractThis article discusses the CAAMmrPartBodyRequest use case. This use case explains how to open a Part document and explore its content from a mechanical modeler perspective, down to the topological entities that capture the shape of the mechanical entities contained in the document. |
This use case is intended to help you make your first steps in programming the Mechanical Modeler. Its main intent is to introduce important concepts about the underlying data structure of the mechanical modeler, and ways to navigate it. More specifically, you will learn how to:
In bracket, we have referenced technical articles which describe in details the concepts in relationship with this use case.
[Top]
CAAMmrPartBodyRequest is a use case of the CAAMechanicalModeler.edu framework that illustrates MechanicalModeler framework capabilities.
[Top]
The goal of CAAMmrPartBodyRequest is to open a Part document and navigate data structure in it that represents the concepts presented in the referenced technical articles. Namely, it:
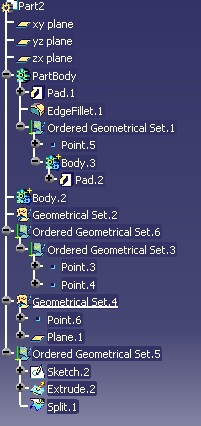
Here is an sample, with the CAAMmrPartBodyRequest Part document
(see the How to Launch CAAMmrPartBodyRequest section for its
location).
|
The output traces for this Part are the following:
The CAAMmrPartBodyRequest use case begins
The document CAAMechanicalModeler.edu\InputData\CAAMmrPartBodyRequest.CATPart is opened
Using CATIDescendants
The list of Body Features: , has 3 element(s)
Body.3 E_FAIL for GetResult
PartBody
Count of elements in the result list=5
Solid.1, its topological result is with the following tag : 474
Sketch.1, its topological result is with the following tag : 263
Point.5, its topological result is with the following tag : 10351
Sketch.3, its topological result is with the following tag : 10507
Solid.1, its topological result is with the following tag : 10543
Body.2
Count of elements in the result list=0
The list of Ordered Geometrical Set: , has 4 element(s)
Ordered Geometrical Set.1 E_FAIL for GetResult
Ordered Geometrical Set.3 E_FAIL for GetResult
Ordered Geometrical Set.6
Count of elements in the result list=2
Point.3, its topological result is with the following tag : 627
Point.4, its topological result is with the following tag : 633
Ordered Geometrical Set.5
Count of elements in the result list=2
Sketch.2, its topological result is with the following tag : 9026
Split.1, its topological result is with the following tag : 9915
The list of Geometrical Set: , has 2 element(s)
Geometrical Set.2
Count of elements in the result list=0
Geometrical Set.4
Count of elements in the result list=2
Point.6, its topological result is with the following tag : 10714
Plane.1, its topological result is with the following tag : 11178
Using CATIPartRequest
The list of Body Features: , has 2 element(s)
PartBody
Count of elements in the result list=5
Solid.1, its topological result is with the following tag : 474
Sketch.1, its topological result is with the following tag : 263
Point.5, its topological result is with the following tag : 10351
Sketch.3, its topological result is with the following tag : 10507
Solid.1, its topological result is with the following tag : 10543
Body.2
Count of elements in the result list=0
The list of Surfacic Sets: , has 4 element(s)
Geometrical Set.2
Count of elements in the result list=0
Ordered Geometrical Set.6
Count of elements in the result list=2
Point.3, its topological result is with the following tag : 627
Point.4, its topological result is with the following tag : 633
Geometrical Set.4
Count of elements in the result list=2
Point.6, its topological result is with the following tag : 10714
Plane.1, its topological result is with the following tag : 11178
Ordered Geometrical Set.5
Count of elements in the result list=2
Sketch.2, its topological result is with the following tag : 9026
Split.1, its topological result is with the following tag : 9915
The CAAMmrPartBodyRequest use case is ended
|
You can note that :
Using CATIPartRequest you do not have
the same count of geometrical features sets than using CATIDescendants.
The ordered sets [1] (Body.3,Ordered Geometrical Set.1, and Ordered
Geometrical Set.3), aggregated by a set, are not returned by CATIPartRequest.
CATIBodyRequest does not return the
"absorbed" features ( Extrude.2 is excluded from the
result of Ordered
Geometrical Set.5)
[Top]
To launch CAAMmrPartBodyRequest, you will need to set up the build time environment, then compile CAAMmrPartBodyRequest along with its prerequisites, set up the run time environment, and then execute the use case [3]. To launch the use case, execute the following command:
mkrun -c "CAAMmrPartBodyRequest Filename "
where Filename is the complete path of a Part document. You can use the
CAAMmrPartBodyRequest.CATPart located:
InstallRootDirectory/CAAMechanicalModeler.edu/InputData
InstallRootDirectory\CAAMechanicalModeler.edu\InputData[Top]
The CAAMmrPartBodyRequest use case is made of a single source file named CAAMmrPartBodyRequest.cpp located in the CAAMmrPartBodyRequest.m module of the CAAMechanicalModeler.edu framework:
| Windows | InstallRootDirectory\CAAMechanicalModeler.edu\CAAMmrPartBodyRequest.m\ |
| Unix | InstallRootDirectory/CAAMechanicalModeler.edu/CAAMmrPartBodyRequest.m/ |
where InstallRootDirectory is the directory where the CAA CD-ROM
is installed.
[Top]
There are seven logical steps in CAAMmrPartBodyRequest:
We will now comment each of those sections by looking at the code.
[Top]
int main(int iArgc, // Number of arguments (1)
char **iArgv) // Path to an existing Part document
{
...
char *pSessionName = "SampleSession";
CATSession *pSession = 0;
HRESULT rc = ::Create_Session(pSessionName, pSession) ;
...
|
The use case is a main (batch) program that takes a single argument - the path to an existing Part document. This first section opens a session to read the document in memory.
[Top]
...
CATDocument *pDoc = 0;
if( SUCCEEDED(CATDocumentServices::OpenDocument(iArgv[1], pDoc)) )
{
CATInit *pDocAsInit = 0;
if( SUCCEEDED(pDoc->QueryInterface(IID_CATInit, (void**)&pDocAsInit)) )
{
CATIPrtContainer *pSpecContainer =
(CATIPrtContainer*)pDocAsInit->GetRootContainer("CATIPrtContainer");
pDocAsInit->Release();
...
|
The CATDocumentServices::OpenDocument static method opens the document
from its disk location and returns it as a CATDocument. This is the
implementation for all of the interfaces that a document must implement.
Documents are internally divided in containers [4]. If you think of a document as an apartment, then the containers are its rooms. Like the rooms in an apartment, containers are specialized. Each contains a specific set of data that represent some aspect of the overall document.
The first container found in a document is a high-level container that basically give access to all the other, more specialized containers in the document, although it may contain other data as well. Along our apartment metaphor, it is similar to the lobby in which you enter first, and which provides access to the other rooms in the apartment. This container is called the root container.
The first interface that we use on that document is CATInit. Through
its GetRootContainer method, we can access the document's root
container.
In a Part document, the root container is the container that contains the
features-based definition of the part being modeled. Such structure can be
explored through a dedicated interface, CATIPrtContainer, that is of
course implemented by the root container. By giving this interface name as
argument to GetRootContainer, the root container is returned cast
to this interface type, which makes it ready for being parsed as a Part.
[Top]
...
CATIPrtPart_var spPart( pSpecContainer->GetPart() );
pSpecContainer->Release();
...
|
We readily use the CATIPrtContainer to access the Part feature [5].
The GetPart method returns a CATIPrtPart interface pointer
on this feature. We will then
use a navigation facet, namely the CATIPartRequest interface, onto the Part
feature in order to discover its structure.
[Top]
...
cout <<"Using CATIDescendants" << endl <<endl;
CATIDescendants *pPartAsDescendants = 0;
rc = spPart->QueryInterface(IID_CATIDescendants, (void**)&pPartAsDescendants) ;
...
// 6-1 Extracts the lists of its Body Features
CATLISTV(CATISpecObject_var) BodyListDesc;
pPartAsDescendants->GetAllChildren("CATIMechanicalTool", BodyListDesc);
cout <<" The list of Body Features:" ;
PrintGeometricalFeaturesSetsResult2(BodyListDesc);
// 6-2 Extracts the lists of its OGS
CATLISTV(CATISpecObject_var) OGSList;
pPartAsDescendants->GetAllChildren("CATIMmiOrderedGeometricalSet",OGSList);
cout <<" The list of Ordered Geometrical Set:" ;
PrintGeometricalFeaturesSetsResult2(OGSList);
// 6-3 Extracts the lists of its GS
CATLISTV(CATISpecObject_var) GSList;
pPartAsDescendants->GetAllChildren("CATIMmiNonOrderedGeometricalSet",GSList);
cout <<" The list of Geometrical Set:" ;
PrintGeometricalFeaturesSetsResult2(GSList);
pPartAsDescendants->Release();
pPartAsDescendants = NULL ;
...
|
Using specific interfaces you retrieve all the geometrical features set into the Part document:
CATIMechanicalTool: it is specific to the Body features
CATIMmiOrderedGeometricalSet: it is specific to the Ordered Geometrical Set features
CATIMmiNonOrderedGeometricalSet: it is specific to the Geometrical Set features
The result of the CATIBodyRequest interface and the final extraction of the topological bodies from the set is
delegated to a dedicated function: PrintGeometricalFeaturesSetsResult.
The PrintGeometricalFeaturesSetsResult2 method being just an
encapsulation of the PrintGeometricalFeaturesSetsResult method to
convert a list of CATISpecObject into a list of CATBaseUnknown.
[Top]
...
cout <<"Using CATIPartRequest" << endl <<endl;
CATIPartRequest *pPartAsRequest = 0;
rc = spPart->QueryInterface(IID_CATIPartRequest, (void**)&pPartAsRequest) ;
...
const CATUnicodeString stdContext(" ");
// 7-1 Extracts the lists of its Body Features
CATLISTV(CATBaseUnknown_var) BodyList;
pPartAsRequest->GetSolidBodies(stdContext, BodyList);
cout <<" The list of Body Features:" ;
PrintGeometricalFeaturesSetsResult(BodyList);
// 7-2 Extracts the lists of its surfacic sets
CATLISTV(CATBaseUnknown_var) SurfacicSetList;
pPartAsRequest->GetSurfBodies(stdContext, SurfacicSetList);
cout <<" The list of Surfacic Sets:" ;
PrintGeometricalFeaturesSetsResult(SurfacicSetList);
pPartAsRequest->Release();
pPartAsRequest = NULL ;
...
|
We saw earlier that specifying a context was necessary to choose among the
potentially many topological bodies associated to one geometrical features set. This is
what the stdContext variable does here. The blank value is the one
that retrieve standard topological bodies. In case others set of topological
bodies are associated to the geometrical features set by some application, then an
application specific string can be passed to filter them out. For instance, the
Mechanical Modeler maintains additional topological bodies for sheet metal
applications that represent the parts in their unfolded configuration. Those
topological bodies can be accessed through the string "Unfolded".
The CATIPartRequest interface offers a direct access to geometrical
features sets that are associated to the Part, thanks to two dedicated methods, GetSolidBodies and GetSurfBodies.
What is returned are :
E_FAIL. The result of the CATIBodyRequest interface and the final extraction of the topological bodies from the set is
delegated to a dedicated function: PrintGeometricalFeaturesSetsResult.
[Top]
void PrintGeometricalFeaturesSetsResult(const CATLISTV(CATBaseUnknown_var) &iSet)
{
const CATUnicodeString stdContext("");
cout <<" , has " << iSet.Size() << " element(s)" << endl;
for(int curSetIdx=1; curSetIdx<=iSet.Size(); curSetIdx++)
{
CATBaseUnknown_var CurrentSet = iSet[curSetIdx] ;
if ( NULL_var == CurrentSet ) break ;
CATIAlias_var aliasOnCurrentSet = CurrentSet ;
cout << " " << aliasOnCurrentSet->GetAlias().ConvertToChar() ;
CATLISTV(CATBaseUnknown_var) pListResult;
CATIBodyRequest *pBodyRequestOnCurrentSet = NULL;
HRESULT rc = CurrentSet->QueryInterface(IID_CATIBodyRequest, (void**)&pBodyRequestOnCurrentSet);
if ( SUCCEEDED(rc) )
{
rc = pBodyRequestOnCurrentSet->GetResults(stdContext, pListResult);
|
This function takes as input a collection of set, and displays the
values returned by the CATIBodyRequest interface. Its unique method, GetResults,
returns a list of features holding a topological result. The GetResults method requires the context of construction. For
the default context, you can use the empty string or
"MfDefault3DView".
...
for(int curFeatIdx=1; curFeatIdx<=SizeList; curFeatIdx++)
{
CATBaseUnknown_var CurrentFeat = pListResult[curFeatIdx] ;
...
CATIAlias_var aliasOnCurElt = CurrentFeat ;
cout << " " << aliasOnCurElt->GetAlias().ConvertToChar() ;
CATIGeometricalElement *pCurFeatOnGeomElt = NULL ;
rc = CurrentFeat->QueryInterface(IID_CATIGeometricalElement,
(void**)&pCurFeatOnGeomElt);
if( SUCCEEDED(rc) )
{
CATBody_var ResultBody = pCurFeatOnGeomElt->GetBodyResult();
if ( NULL_var != ResultBody )
{
CATICGMObject *pCurTopo = 0;
rc=ResultBody->QueryInterface(IID_CATICGMObject,(void**)&pCurTopo);
unsigned long curResultTag = pCurTopo->GetPersistentTag();
cout <<" ,Its contains a topological result with the following tag : " ;
cout << curResultTag << endl;
|
For each element of the list returned by the GetResults method,
its associated topological body is retrieved. It is possible thanks to the CATIGeometricalElement
interface. The GetBodyResult method retrieves the CATBody
associated with the feature.
[Top]
...
CATDocumentServices::Remove(*pDoc);
...
::Delete_Session("SampleSession");
...
|
After the job is finished, a proper cleanup of document and session is
necessary before ending. To do this, the CATDocumentServices::Remove
static method and the Delete Session global function are used, as
counterpart of CATDocumentServices::Open and Create Session
that were used in the beginning of the use case.
[Top]
This use case has demonstrated the way to programmatically navigate a Part document, form the document itself down to the entities that hold the topology associated with the mechanical bodies of its part.
[Top]
| Version: 1 [Jan 2000] | Document created |
| Version: 2 [Dec 2003] | Document updated |
| Version: 3 [Jun 2004] | Document updated to take R13/R14 novelties into account |
| [Top] | |
Copyright © 2000, Dassault Systemes. All rights reserved.